Smart Car

![]() Research
Research ![]() Smart Car
Smart Car
![]() Research
Research ![]() Smart Car
Smart Car
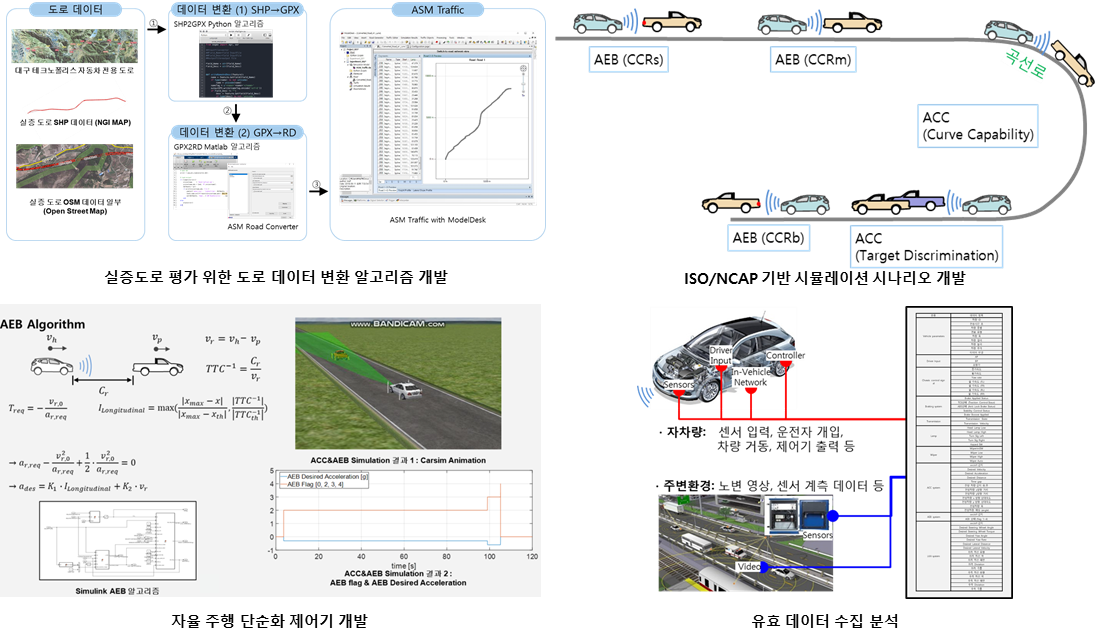
1. 실도로 실증 모델링을 위해 도로 데이터를 변환하는 알고리즘을 개발한다.
2. ISO/NCAP 등의 국제 표준을 사용하여 시뮬레이션을 위한 주변 차량들의 주행 시나리오를 개발한다.
3. 주변 차량의 주행 제어를 위함 AEB (Autonomous Emergency Braking), ACC (Adaptive Cruise Control), LKA(Lane-Keeping Assistance)
4. 시뮬레이션 검증을 수행하고, 계측 장비(차량 내부 센서, 차량 계측용 센서, 도로 인프라 센서)를 통해 취득한 데이터를 분석하고 해당 데이터의 유효성을 분석한다.
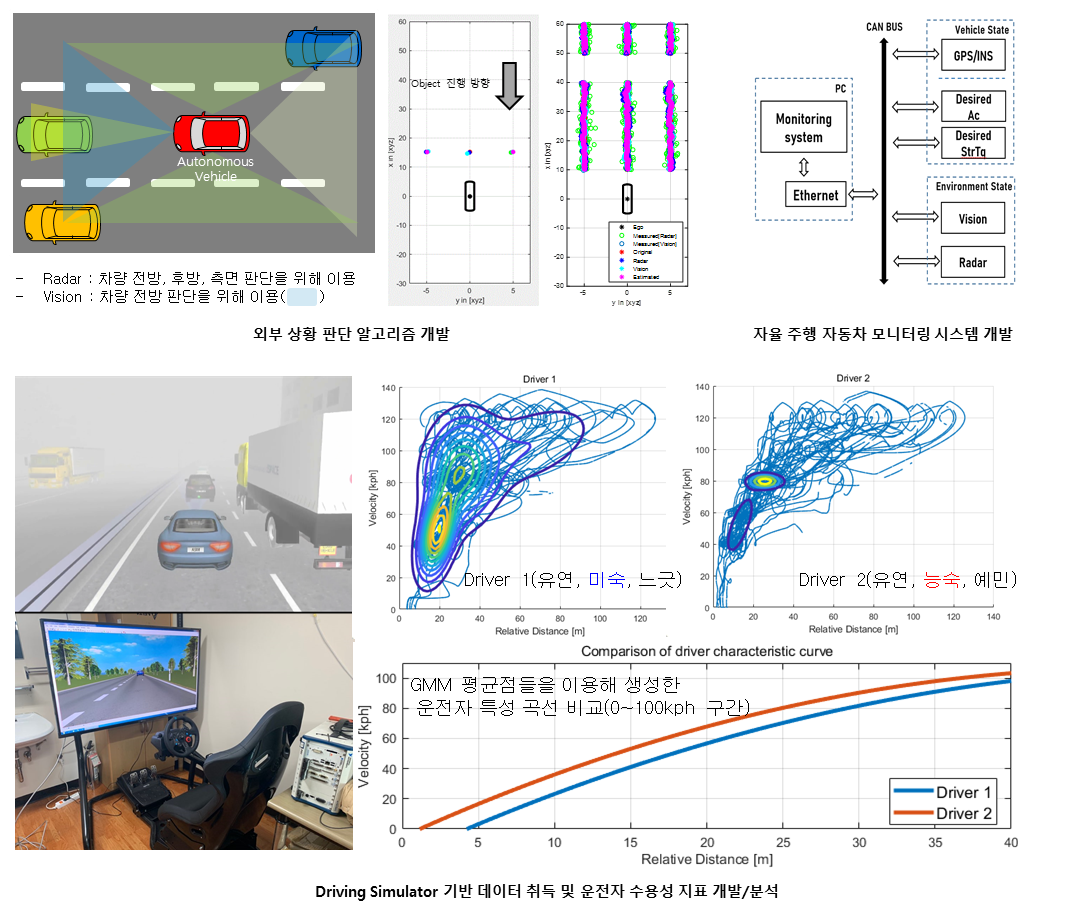
1. 환경센서, IMU를 이용 자율주행 차량 내/외부 상황판단 및 주행상황 판단 알고리즘을 개발한다.
2. 자율주행 차량의 탑승자가 느끼는 수용성 지표를 Machine Learning 기법을 통해 개발 및 평가를 실시한다.
3. 자율주행 시험 평가를 위해 차량 내/외부 상황에 대해 탑승자에게 전달하는 모니터링 시스템을 개발한다.
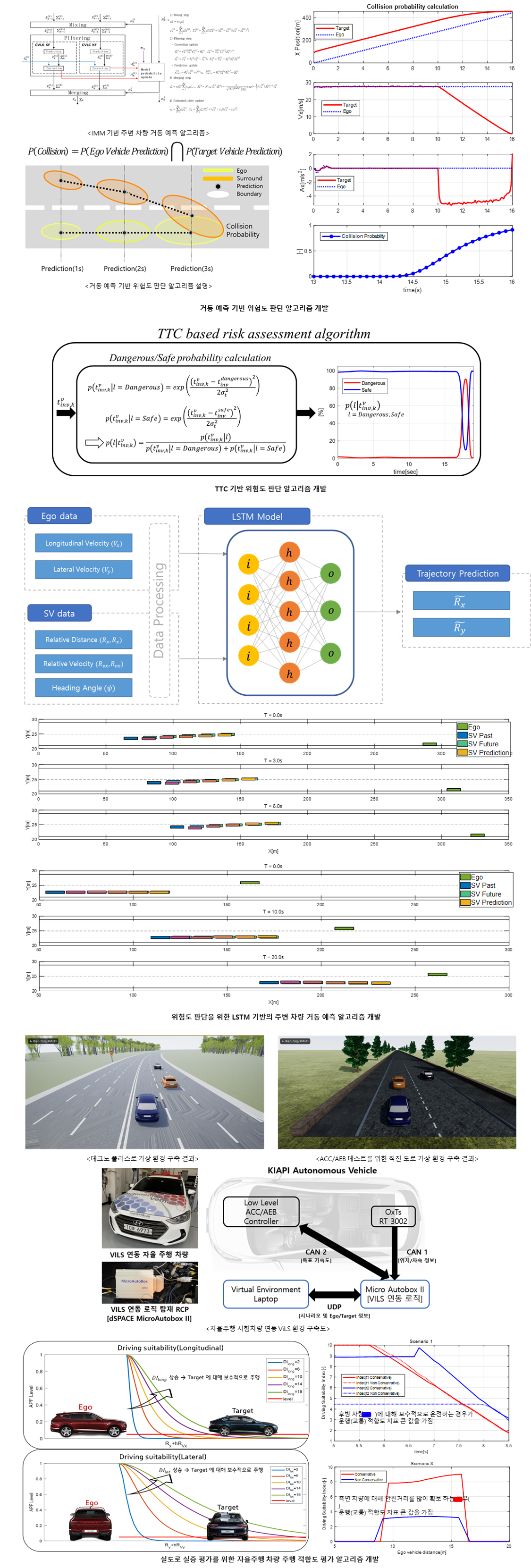
1. 자율주행 차량 주변 상황 판단을 이용한 사고 위험도 평가 (Risk Assessment) 알고리즘 개발
2. 자율주행 차량이 동일 도로 상 다른 차량들 과의 주행 적합성 판단을 위한 주행 적합도 평가 알고리즘 개발
3. 자율 주행차량의 실증도로 평가를 위한 가상 주행 평가 환경(ViLS : Vehicle-in-the-Loop-System) 개발